On October 12, we organized a scientific session of the plenary meeting of the project FrontSeat. During this meeting, two presentations of researchers from IMT School for Advanced Studies Lucca, Italy were presented. The first presenter was Alberto Bemporad, who presented his research on “Learning-based Methods for Model Predictive Control“. Followingly, Mario Villanueva presented his work on “Set-based Computing in Robust Control: A Polytopi Approach“. The scientific session was organized in the framework of the FrontSeat project.
Learning-based Methods for Model Predictive Control
by Alberto Bemporad, IMT School for Advanced Studies Lucca, Italy
Abstract:
Machine learning has gained immense popularity in various fields, including control, due to its ability to extract mathematical models from data. In my talk, I will present different machine learning techniques that can aid in designing and calibrating model predictive control (MPC) laws. I will emphasize the use of offline and online methods for learning piecewise affine and recurrent neural network prediction models. Moreover, I will present global and preference-based optimization techniques that rely on surrogate functions to actively learn the optimal MPC parameters and to identify critical scenarios from closed-loop experiments.

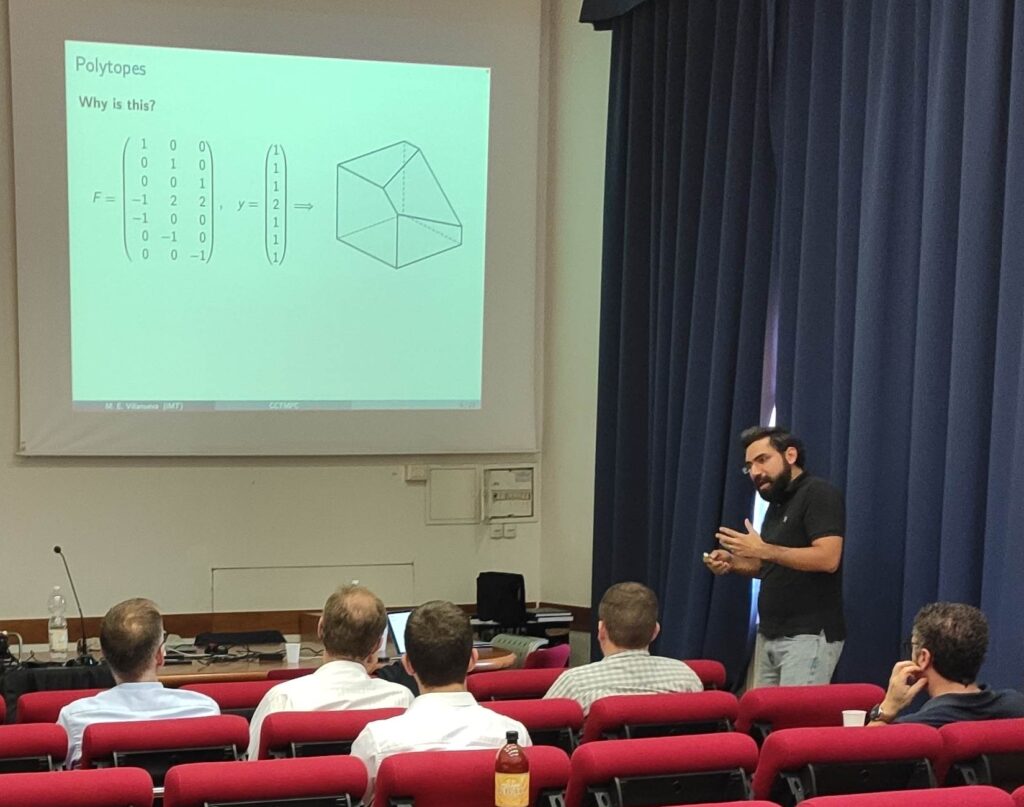
Set-Based Computing in Robust Control: A Polytopic Approach
by Mario Eduardo Villanueva, IMT School for Advanced Studies Lucca, Italy
Abstract:
Set-based computing methods are the foundation of a variety of problems and tasks such as validated arithmetic (reliable computing), uncertainty propagation, set-invariance, robust control, analysis of hybrid systems, and safe learning among many others. This talk presents recent breakthroughs in the field of set-based computing. In particular, the focus is on a novel class of configuration-constrained polytopes that admit a joint affine parameterization of their vertices and facets. This parameterization can be used to optimize the location and geometric shapes of potentially high-dimensional polytopes with millions of facets and vertices by relying on a large-scale linear program (LP) solver. The second part of the talk focuses on an application of such configuration constraint polytopes in the context of set-invariance and robust model predictive control.
This project has received funding from the European Union’s Horizon under grant no. 101079342 (Fostering Opportunities Towards Slovak Excellence in Advanced Control for Smart Industries).


{kind=link}
1 Comment
FrontSeat Consortium Meeting at UNIPI - FrontSeat · October 27, 2023 at 9:01 am
[…] Prof. Maio Villanueva gave a talk on “Set-Based Computing in Robust Control: A Polytopic Approach“. Read more about the scientific seminar here. […]